
 |
| ARL scientists want to equip Kumar’s miniature quad rotor with a staring spherical camera. Built like an eye of a fly, the two hemispheres will be able to stare over the upper and lower hemispheres of the platform, covering the full sphere. This wide-field sensing based on the neurophysiology of insects, will enable navigation and obstacle avoidance on micro aerial robots Photo: ARL |
 |
| Dr. Joseph Conroy checks the vehicle operation of the ARL micro-quadrotor, a platform for testing integrated sensing and processing on size constrained robotic systems. (ARL Photo by Doug Lafon) |
Robots and structures on this size and scale can access difficult to reach areas, for search and rescue or reconnaissance behind closed doors
Technologies studied under Developed ARL’s Micro Autonomous Systems and Technology (MAST) offer such potential capabilities under a collaborative technology alliance between ARL, the R&D community, industry and academia.
 |
| Prof. Vijay Kumar,of the School of Engineering University of Pennsylvania. A pioneer in quadrotor robotics, Kumar is currently assigned to the White House Office of Science and Technology Policy where he serves as the assistant director for robotics and cyber physical systems. |
“This device has a large percent of the capabilities that we have wanted.” Mait added, “That is a true sign of progress and the types of innovation that we supported through the MAST CTA. Within ARL itself, it has established us now as an organization capable of delivering autonomous platforms that are as large as a passenger vehicle but also as small as something that can be carried around with two arms then also carried in a single hand.”
Researchers are currently working with the micro-quadrotor as a platform for testing integrated sensing and processing on size-constrained robotic systems. The system is currently able to fly using a manual pilot control or within a test environment that utilizes an external visual tracking system, such as a Vicon system. The next step will add autonomy to such systems. “We have people capable of developing autonomy at all of those scales, which opens up doors and greater creativity at how all these platforms can be used by teams of Soldiers of various sizes from a company down to a squad.” Mait concluded.
“We are creating autonomous flying robots that are able to navigate in complex, three-dimensional environments with or without GPS with applications to search and rescue, first response and precision farming.” Kumar tells about the latest research projects on Kumarrobotics. “The robots are quadrotors with onboard sensors and processors customized for state estimation, control and planning. We rely on a range of sensors that can include an IMU, cameras, a laser range scanner, an altimeter and a GPS sensor. His smallest robot has a mass of 20 grams and is capable of navigating at 6 m/s in indoor environments.
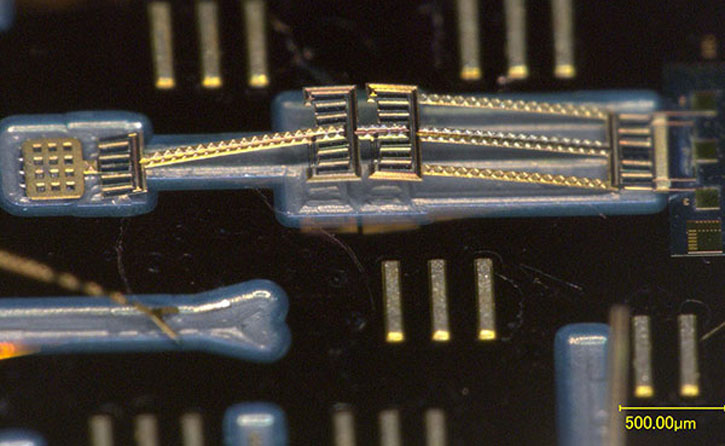 |
| ARL has demonstrated independently controlled large-displacement three-jointed insect inspired legs for future mm-scale robotic systems using microelectromechanical system (MEMS) fabrication techniques. |
 |
| Dr. Ronald Polcawich performs high-resolution imaging and testing of a millimeter-scale robotic leg structure. The roughly 3-mm-long leg consists of segments of piezoelectric thin-film actuators and thin-film copper sections designed to mimic the kinetics of a leg with a “hip,” “knee” and “ankle” joint sections. These “legs” have demonstrated the ability to move, lift (e.g., salt crystal in image), and resist impact into the silicon substrate. (Photo by Doug Lafon) |
The program seeks to enhance the tactical situational awareness of the dismounted Soldier, in urban and complex terrain, by autonomous, collaborative and multifunctional mobile microsystems
“It is envisioned that robots and structures on this size scale can provide a unique set of advantages and capabilities to the Soldier. Their inherent size makes them useful to access difficult to reach areas such as in rubble for search and rescue and behind closed doors for reconnaissance,” stated Polcawich.
“The MAST program seeks to enhance the tactical situational awareness of the dismounted Soldier in urban and complex terrain by enabling the autonomous operation of a collaborative ensemble of multifunctional mobile Microsystems,” said Dr. Brett Piekarski, chief of ARL’s Micro and Nano Materials and Devices Branch within the Sensors and Electron Devices Directorate and Cooperative Agreement Manager of the MAST Collaborative Technology Alliance (CTA).
The structure and goals of the MAST CTA were developed by Dr. Tom Doligalski and Dr. Joseph Mait. Mait led the CTA when it was awarded in February 2008. The CTA is comprised of four research centers and numerous consortium members. The research centers include the Platform Integration Center, BAE Systems (Lead); Microsystem Mechanics Center, University of Maryland; Processing for Autonomous Operation Center, University of Pennsylvania; and Microelectronics Center, University of Michigan.
Other ARL MAST consortium members include the California Institute of Technology, Georgia Institute of Technology, Harvard University, Jet Propulsion Laboratory, Massachusetts Institute of Technology, North Carolina Agriculture and Technical University, University of California-Berkeley, University of New Mexico and the University of Pennsylvania. The research is funded by ARL into 2017.
The technical approach to meet the goals and objectives of the MAST CTA is to focus on the critical science and technology research areas as they pertain to small scale platforms including mobility, control and energetics; communication, navigation and coordination; sensing, perception, and processing.
In the areas of mobility, control and energetics, researchers are studying aeromechanics at small scales, body and appendage design at small scales, algorithms for complex navigation and small-scale platform propulsion and actuation.
In the area of communication, navigation and coordination, researchers are focusing on how to enable intelligent communication, networking and collaboration between micro autonomous robotic platforms. Under sensing, perception and processing, researchers are looking at low-power sensors for navigation, obstacle detection, and intelligence, surveillance and reconnaissance. defense-update
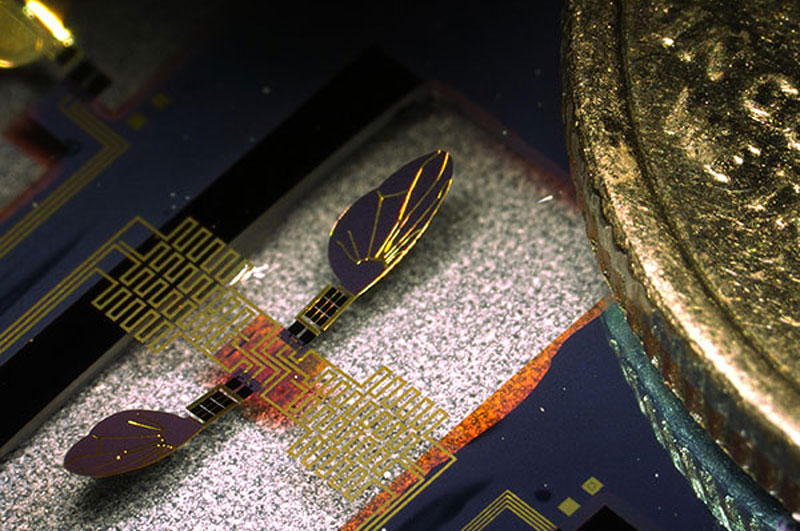 |
| An ARL demonstration of full range of motion and aerodynamic lift in fruit fly scaled microelectromechanical system (MEMS) fabricated wings. (Photo: ARL) |
Post a Comment Blogger Facebook Disqus